Опробованный мною вариант использования модулей XBee в качестве средства обмена данными между коптером и MultiWiiWinGUI еще не прошел полноценные испытания.
Однако, это может оказаться кому то полезным.
Шаг первый.
Добавляем строку в Config.h
/****** Serial com speed *********************************/
/* This is the speed of the serial interfaces */
#define SERIAL0_COM_SPEED 115200
#define SERIAL1_COM_SPEED 115200
#define SERIAL2_COM_SPEED 115200
#define SERIAL3_COM_SPEED 115200
#define ZigbeePort 3

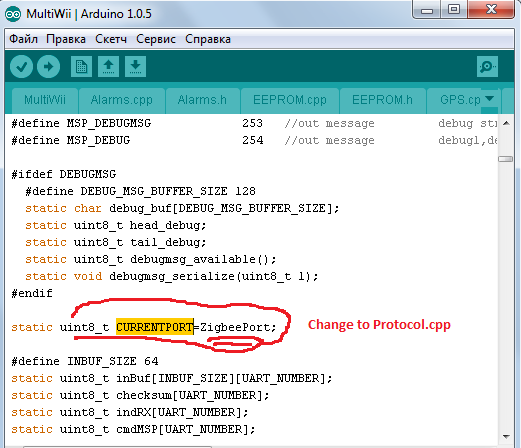
Шаг второй.
Изменяем строку в Protocol.cpp
//static uint8_t CURRENTPORT=0;
static uint8_t CURRENTPORT=ZigbeePort;
Шаг третий.
Добавляем строки в MultiWii.cpp. Это инициализация режима "Байпас" при запуске приложения. Если модуль XBee не программируемый - этот шаг можно пропустить.
#endif
plog.armed_time = 0; // lifetime in seconds
//plog.running = 0; // toggle on arm & disarm to monitor for clean shutdown vs. powercut
#endif
debugmsg_append_str("initialization completed\n");
#if defined(ZigbeePort) && defined(MEGA)
SerialOpen(ZigbeePort,SERIAL3_COM_SPEED);
delay(200);
SerialWrite(ZigbeePort,'B');
SerialWrite(ZigbeePort,13);
SerialWrite(ZigbeePort,'B');
SerialWrite(ZigbeePort,13);
SerialWrite(ZigbeePort,'O');
SerialWrite(ZigbeePort,'k');
SerialWrite(ZigbeePort,'!');
#endif
}

Шаг четвертый.
- Подсоедините Координатора к компьютеру, запустите любой терминал, соединитесь с модулем, переведите его в режим "Байпас" (литера 'B' и Enter). Отключите терминал.
- Подсоедините Роутера к Srial 3 Arduino как это показано на фото. Подайте питание на Arduino.

Настройка закончена.
Запустите WinGui и подключитесь к Координатору.














